

Typ Sterowania |
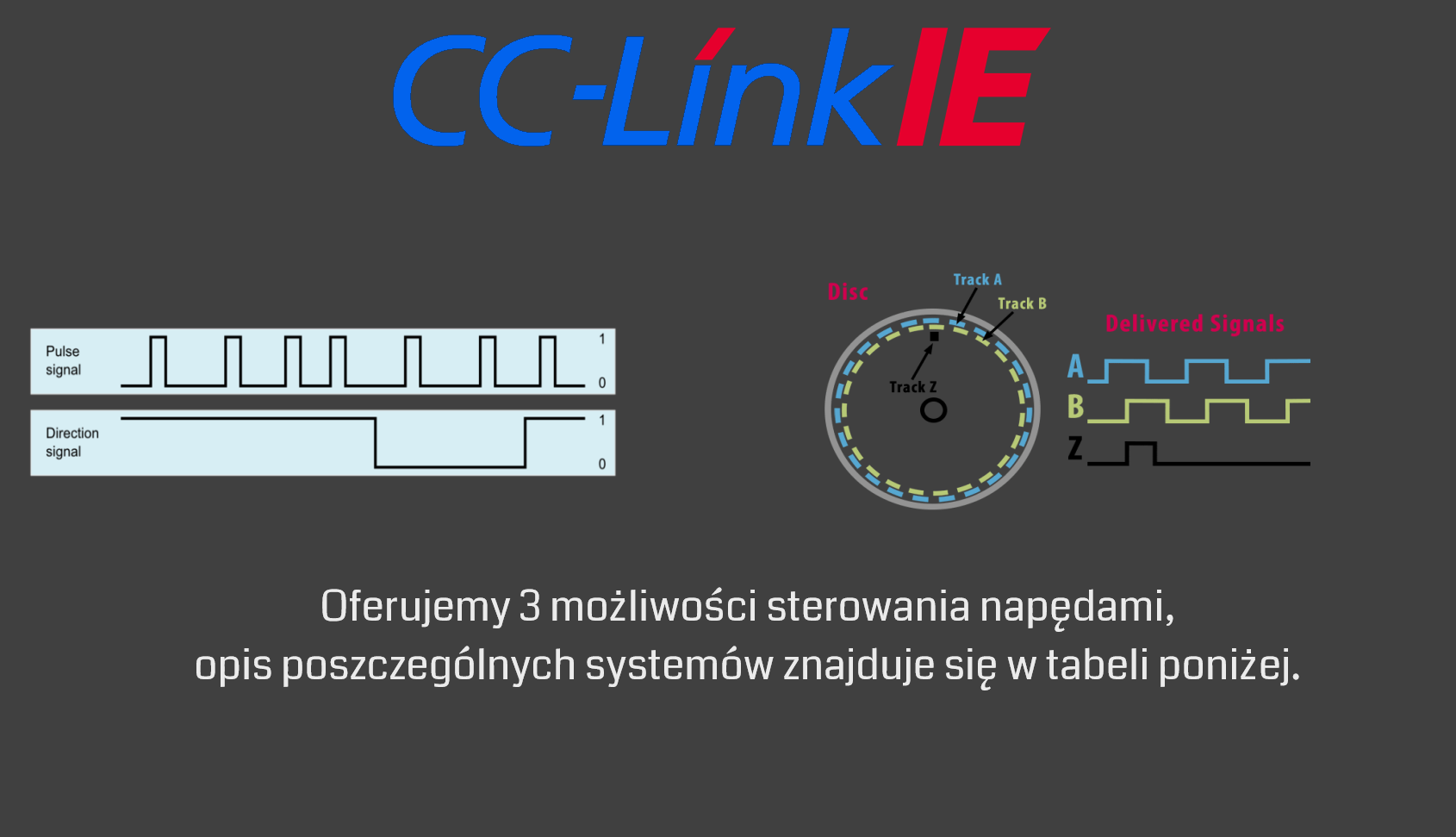
Impulsowe |
Analogowe |
Komunikacyjne CC-Link IE TSN |
Zasada działania |
Sterownik wysyła sygnały pulse i direction. Sygnał pulse odpowiada za przemieszczenie przyrostowe osi. Np wysyła 1 impuls, co odpowiada za przemieszczenie o 0.001 mm. Sygnał direction określa kierunek, w którym przemieszczenie występuje. |
Sterownik wysyła sygnał analogowy napięciowy od -10v do plus 10v, gdzie przedział od 0 do 10v określa prędkość zadaną silnika od zera do maksymalnej prędkości w kierunku CW, a przedział od 0 do -10v prędkość od 0 do maksymalnej prędkości w kierunku CW. Zwrotnie sterownik otrzymuje sygnał z enkodera, które otrzymuje jako aktualną pozycję. Dzięki algorytmowi PID sterownik tak dostosowuje sygnał analogowy plus minus 10v, żeby pozycja aktualna zgadzała się z pozycją zadaną. |
Sterownik wysyła do napędu informację z zadanym położeniem, prędkością, momentem obrotowym i wieloma innymi zmiennymi w czasie rzeczywistym. W odpowiedzi otrzymuje informację o bieżącej pozycji, prędkości, obciążeniu itd. Dzięki temu można dokonać zmian odpowiadających na aktualne sytuacje. |
Precyzja |
Dokładność jest ściśle uzależniona od maksymalnej możliwej prędkości pracy. Tzn im wyższa ustawiona rozdzielczość wyjścia impulsowego, tym większa dokładność, niestety kosztem maksymalnej prędkości. |
Dokładność jest ściśle uzależniona od maksymalnej możliwie prędkości pracy. Tzn im wyższa ustawiona rozdzielczość enkodera, tym większa dokładność, niestety kosztem maksymalnej prędkości. |
Nie jest uzależniona od prędkości. Sterownik pracuje z pełną rozdzielczością enkodera, która wynosi nawet miliony impulsów na 1 milimetr. |
Prędkość |
Uzależniona od precyzji j.w. |
Uzależniona od precyzji j.w. |
Nie jest uzależniona od precyzji. Sterownik może pracować z prędkością maksymalną silnika. |
Błędy pozycji |
Sterowanie jest wykonywane 'na ślepo', przez to nie mamy kontroli nad uchybem, który może się pojawić w trakcie pracy. Zalecane jest częste 'bazowanie'maszyny. To tak jakbyśmy nawigowali przez telefon kierowcę, który miałby uszkodzony mikrofon w swoim telefonie. On by nas słyszał, wiedziałby gdzie jechać, ale my nie mamy pewności, czy jest aktualnie w oczekiwanym przez nas miejscu. |
Sterowanie korzysta z pętli zamkniętej, dzięki temu mamy pełną kontrolę nad powstającym uchybem w czasie rzeczywistym. |
Sterowanie korzysta z pętli zamkniętej, dzięki temu mamy pełną kontrolę nad powstającym uchybem w czasie rzeczywistym. Błędy pozycji nie występują. |
Bazowanie |
Istnieje konieczność najazdu na punkty referencyjne, żeby nasza oś mogła się odnaleźć w układzie współrzędnych. Zalecane jest bazowanie również w trakcie pracy. |
Konieczne jest jednorazowe bazowanie osi, które jest też dokładniejsze dzięki wykorzystaniu impulsów z enkodera. |
Nie stosuje się bazowania maszyny. Enkodery w serwosilnikach są absolutne, a nie inkrementowane jak w innych przypadkach. Dzięki czemu mamy idealną powtarzalność pomiędzy kolejnym uruchomieniem maszyny. |
Zalecane napędy. * |
Mitsubishi MR-JE-A Mitsubishi MR-J5-A Mitsubishi MR-J4-A Delta ASDA B3-M Delta ASDA A2-M Delta ASDA B2-M |
Mitsubishi MR-JE-A Mitsubishi MR-J5-A Mitsubishi MR-J4-A Delta ASDA B3-M Delta ASDA A2-M Delta ASDA B2-M
|
Mitsubishi MR-J5-G Mitsubishi MR-JET-G Mitsubishi MR-J4-G
|
Podsumowanie |
Jest to typ sterowania najczęściej wybierany przez hobbystów, bądź dla prostych maszyn, gdzie nie wymaga się ogromnej precyzji i szybkości. |
Jest to typ sterowania szeroko wykorzystywany przez maszyny CNC już od samego początku ich powstania. Jest stopniowo wypierany przez sterowanie oparte na możliwościach komunikacyjnych jak CC-Link, Ethercat, profinet itp. jednak nadal można spotkać go w nowych tańszych profesjonalnych maszynach. Aktualnie jest najczęstszym wyborem dla modernizacji sterowania maszyn CNC(tzw retrofit). Ze względu na częstą możliwość wykorzystania istniejących już napędów w maszynie. |
Jest to nowoczesny system sterowania dla maszyn CNC. Oferuje najwyższą prędkość, powtarzalność i precyzję. Jest to system bezkompromisowy. Preferowany dla systemów sterownia TORNERO. |
W praktyce zadziałają dowolne oferujące wybrany rodzaj sterowania.